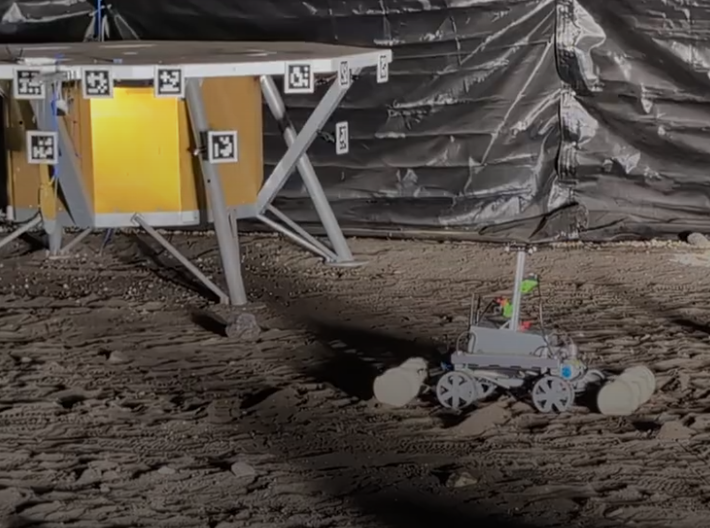
We developed a suite of onboard flight software applications integrated into the VIPER lunar rover. These applications are designed to provide mobility features and enable the rover to manage challenging lunar terrain. This software suite was developed under a Small Business Innovation Research (SBIR) Phase III award. Our work included developing and integrating proprietary algorithms into the VIPER Core Flight System (cFS), resulting in the following applications:
The EMBED app utilizes a proprioceptive, low-bandwidth, slip and embedding estimation algorithm. This algorithm is designed to detect when the rover is at risk of high slip rates in loose lunar regolith and to initiate a stop command to prevent entrapment.
The CRAWL app provides the rover with a variety of specialized gaits, suchs as "inching," "swimming," and walking. This software supports the rover in extricating itself from challenging mobility situations or continuing travel using damaged components, thereby addressing unforeseen mobility hazards on the lunar surface.
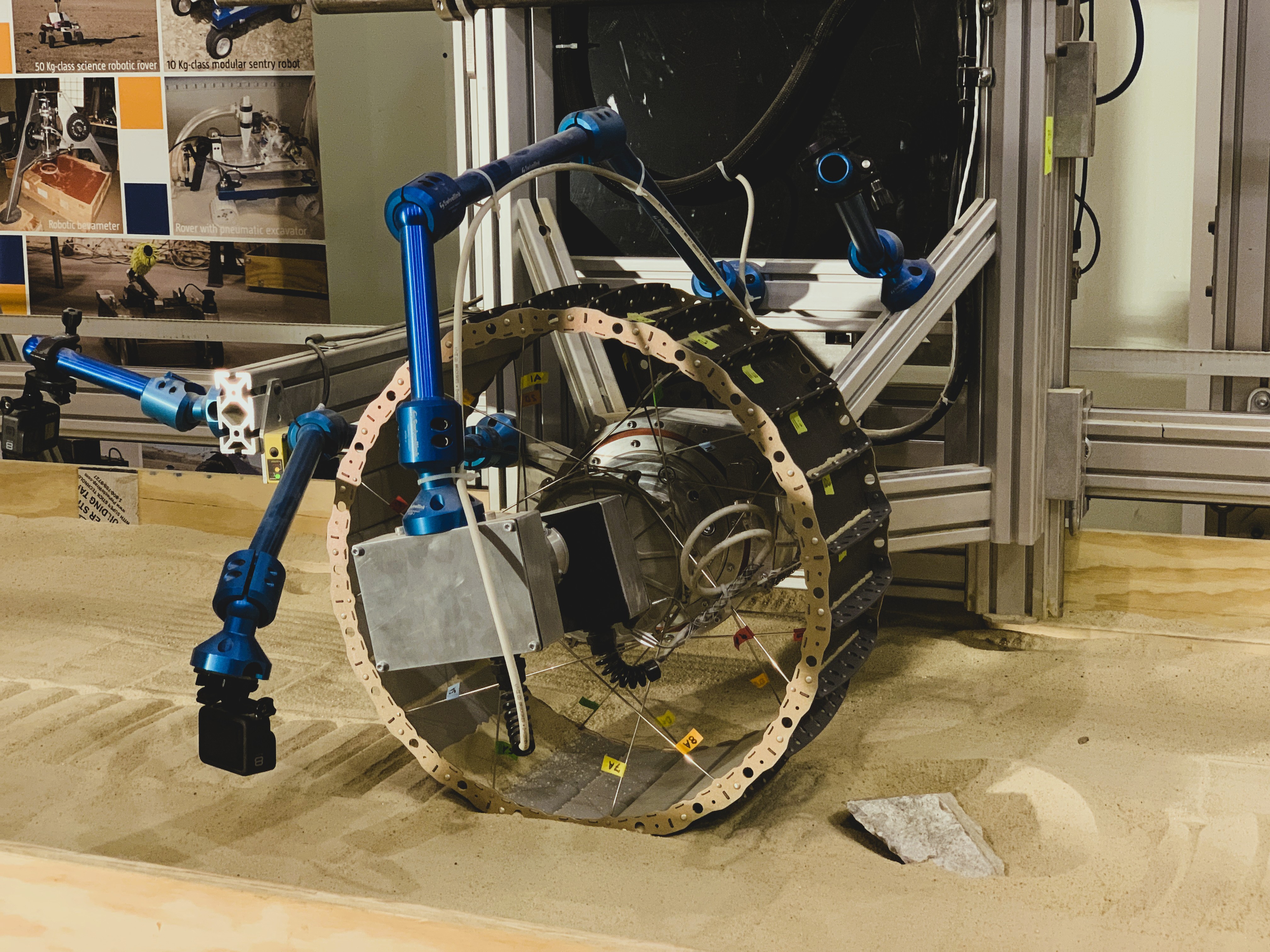
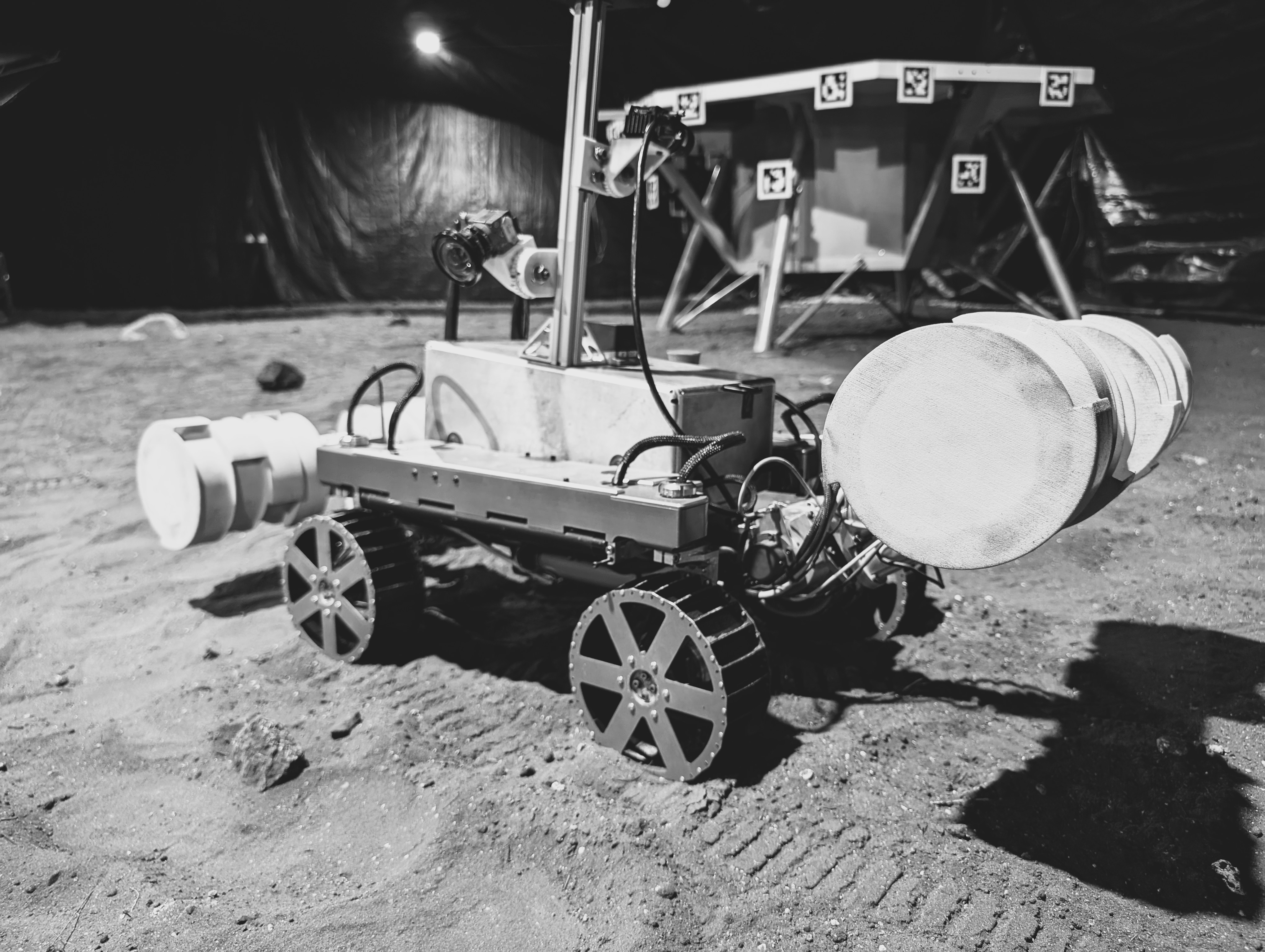
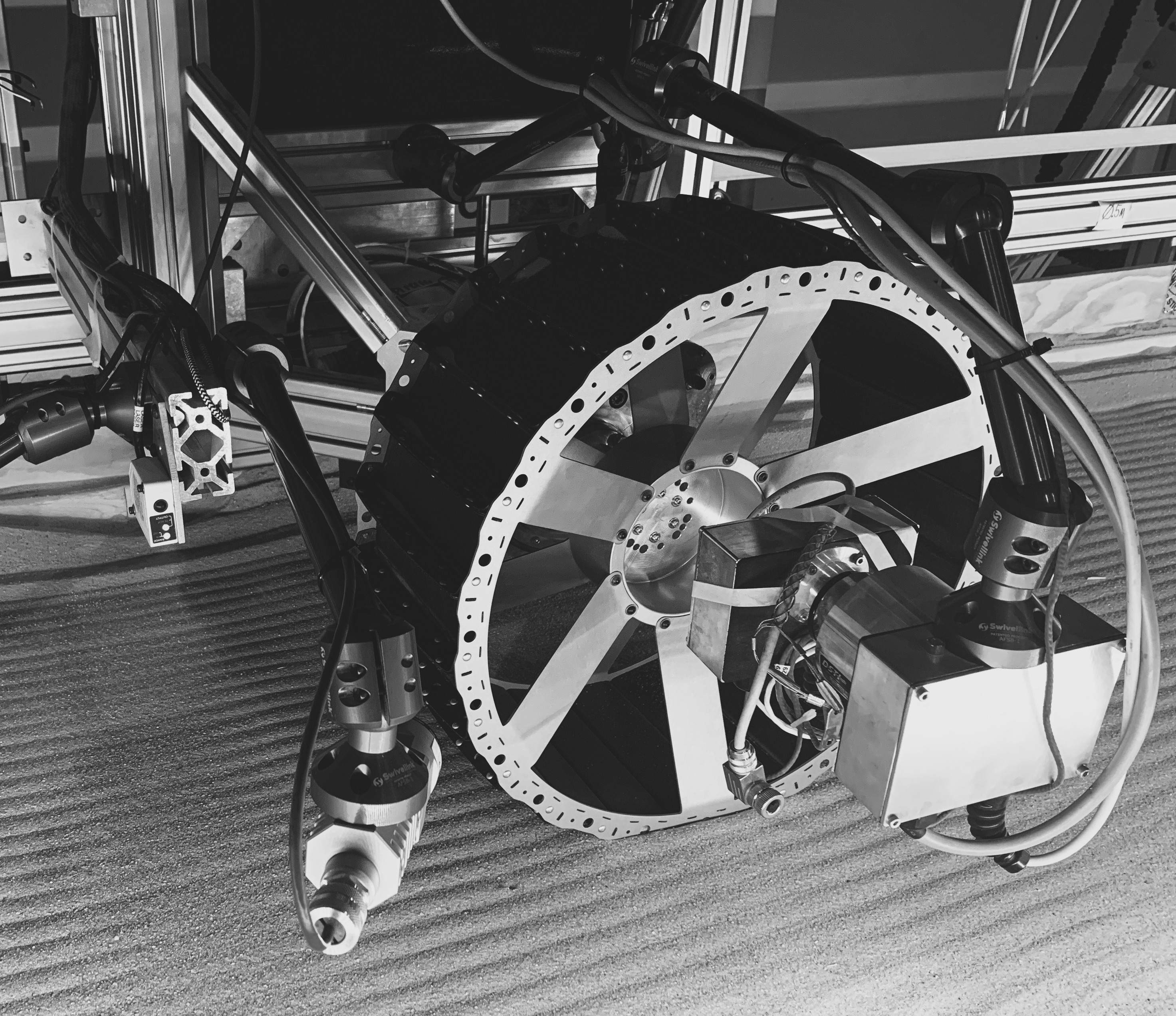
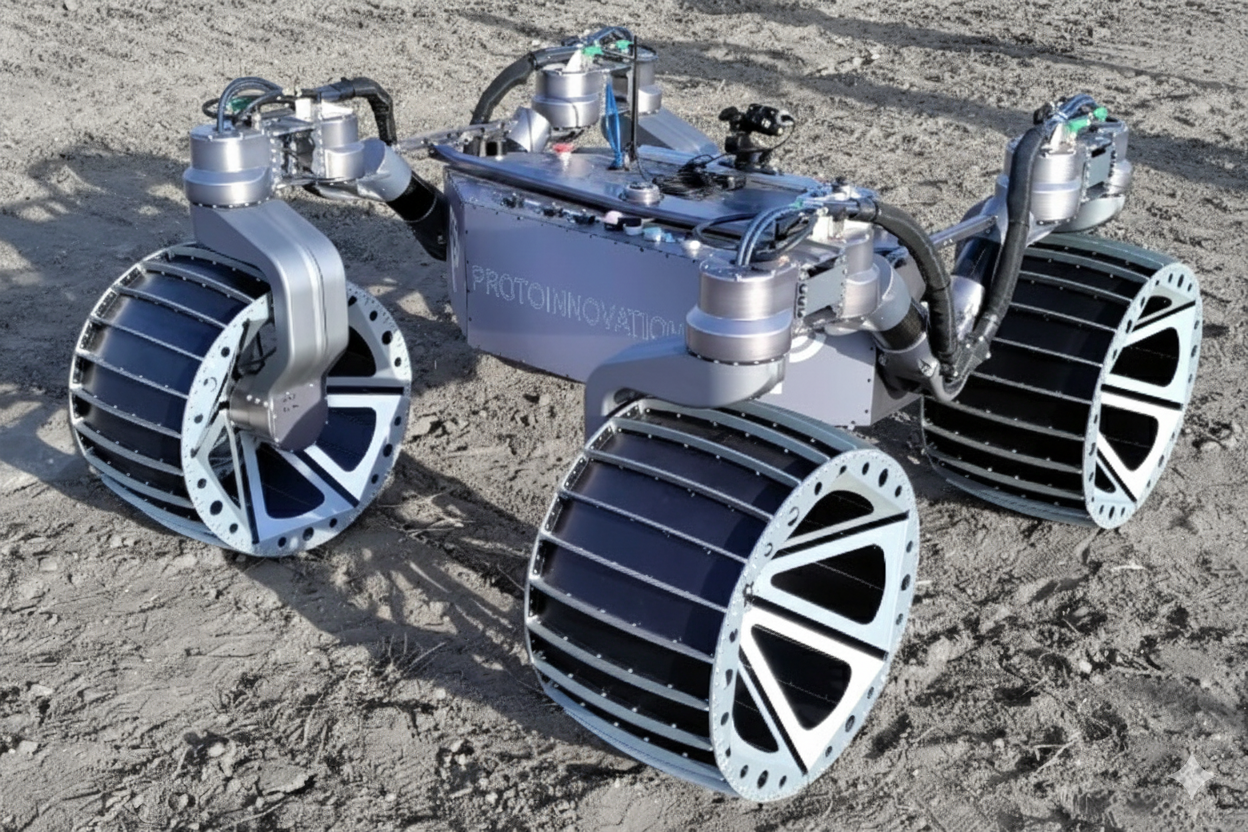
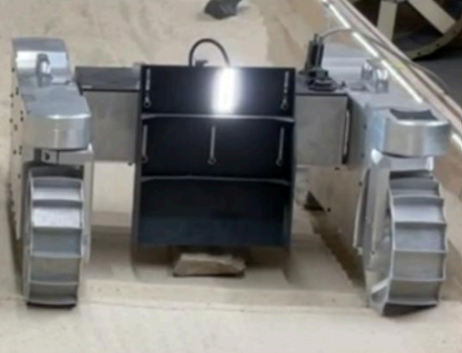
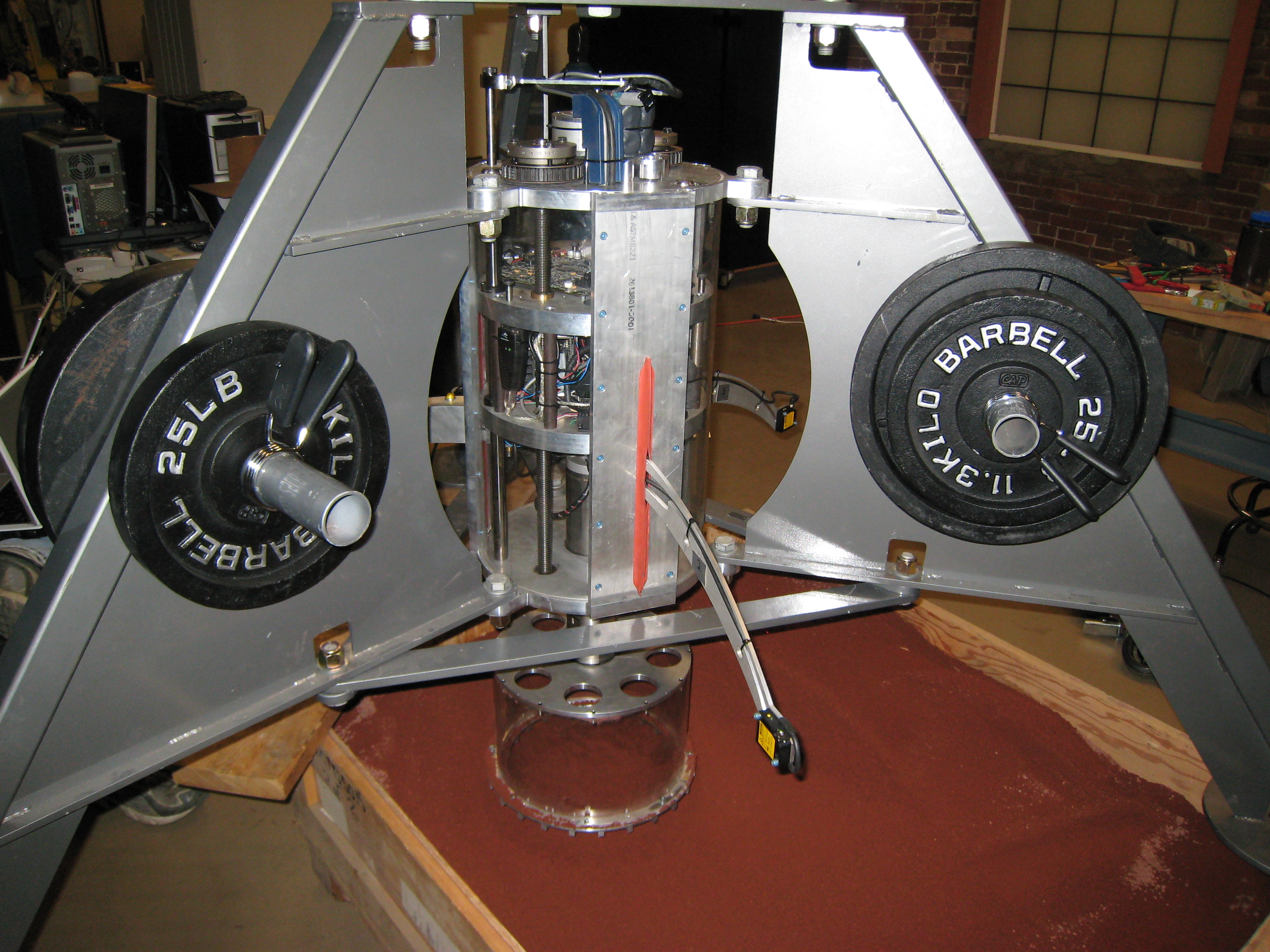
In addition to flight software development, ProtoInnovations provided systems engineering support and extensive testing services. Our engineers collaborated with NASA teams on large-scale mobility tests utilizing the MGRU3 rover in simulated lunar environments, including the SLOPE lab at Glenn Research Center and the Roverscape at Ames Research Center. We also conducted durability and performance testing on a flight-design VIPER wheel in our own testbed, executing a 40km traverse over simulated lunar terrain. This comprehensive testing approach was utilized to perform Verification and Validation (V&V) for the VIPER flight wheel and validate our integrated software and hardware solutions under realistic test conditions.
Our work included mission readiness and risk management deliverables. We delivered a detailed framework for diagnosing mobility issues and a system for classifying terrain hazards. This framework provides methods for mission operators to identify the root cause of a mobility problem—whether due to terrain, a component fault, or structural damage—and recommends a corresponding course of action. ProtoInnovations’ focus on proactive risk assessment and recovery procedures supported the VIPER mission preparation efforts. ProtoInnovations personnel participate as part of the anomaly response group during mission operations.
The services and products described herein are provided by ProtoInnovations, LLC. This presentation, content, or the products/services are not endorsed by the National Aeronautics and Space Administration (NASA) or any specific federal employee.